UTS Robotics Society - NI Competition Robots
As one of the founding members of the UTS Robotics Society, I had heavy involvement with competitions and held various positions in the clubs operationg (VP, Comp lead). The yearly regular competition I was always involved with was the National Instruments Robotics Competition, running from 2013-2016. Each year the team would produce a brand new robot, multiple design iterations to meet challenging design tasks. Some brief notes on each years robots plus my role including below.
NI Comp highlights. Images scraped from YT linked at bottom of page. Every year as knowledge and experience increased we tried more challenging approaches and complemented our studies and learning in robotics with physical experience.

2013 - Gold collection robot. Final design was in the top 4 finishes of the competition. Algorithms utilised: wall following, localisation through lidar space estimation algorithm, and naive colour matching. Won the design award as the camera failed to initialise on a knockout round the robot could not tell the difference between target cubes vs false ones.

2014 - Farming robot, load and deliver. Final design knocked out in round of 8. Speed accurate deliveries but with no feedback on drop positions cubes would occasionally role to far from targets. Encoding / position estimation in our lab vs tuned for competition track.

2014 - Farming robot drop precision, most of the time.
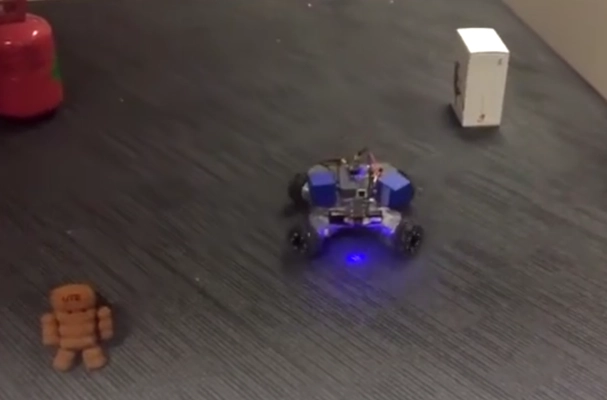
2015 - Autonomous delivery robot. First dabble into omni-wheel robots. Extremely high speed, heavy weight robot that on the 3rd round on the course crashed, damaging a few critical sensors. We focused on advanced robot algorithms and tweaking / tuning these was very environment dependent. For instance the speed we could travel / acceleration / grip all became factors.
2015 - SLAM map built from omni robot in a maze. Still learning SLAM at this stage so position estimation approach / map generation was rudimentary but fun practical experience. Utilised a custom programmed extended kalman filter being fed with motor data and lidar position estimation data.

2016 - Hospital robot. At this stage heading towards graduation most of my time was on mentoring / helping programmers understand LabView and fill any gaps as necessary. Algorithms and sensing went back to basic (ultrasonics / IRs / encoders for pos estimation) and focused on consistent runs.
The below 10min video has a good summary of all the different robots worked on with the Robotics Society for reference.
